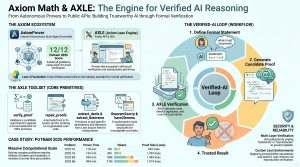
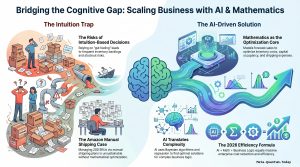
AI + Math → Drive Business (The AI Optimization Engine)
The most expensive business problems cannot be solved by guesswork. The AI Optimization Engine bridges the cognitive gap between human intuition and mathematical precision — translating business logic into Bayesian and regression models that balance inventory, capital, stockout, and freight costs simultaneously. The formula is clear: AI + Mathematics + Business Capability = explosive cost reduction and efficiency.